Погода в Санкт-Петербурге | Pogoda78.ru

4. Современные геодезические спутниковые приемники
4. Современные геодезические спутниковые приемники
Cовременные спутниковые приемники имеют программу, которая анализирует относительное положение всех доступных для наблюдения спутников и выбирает из них четыре, расположенные наилучшим образом, которые и используются для определения координат точки. Более точные результаты получают, когда выполняют обработку измеренных расстояний до всех спутников, находящихся в поле зрения. Поэтому одним из важнейших направлений совершенствования и развития спутниковой радионавигации является совместное использование сигналов ГЛОНАСС и GPS, а в будущем — Galileo. Основные цели этого процесса — повышение точности и надежности (доступности, непрерывности обслуживания и целостности) навигационных определений.
По сложности технических решений и объему аппаратных затрат спутниковые приемники разделяют на:
одноканальные (в том числе мультиплексные, приемник очень быстро переключается между сигналами орбитальной группировки), которые в каждый текущий момент времени ведут прием и обработку радиосигнала только одного спутника, и
многоканальные, позволяющие одновременно принимать и обрабатывать сигналы нескольких спутников.
В настоящее время в основном выпускаются многоканальные приемники.
Кроме того, приемники можно разделить на односистемные, принимающие сигналы GPS, и двухсистемные, принимающие сигналы ГЛОНАСС и GPS. В зависимости от вида принимаемых и обрабатываемых сигналов приемники делятся на:
одночастотные, кодовые, работающие по С/А-коду;
Кодовые приемники (handheld) предназначены для определения трехмерного положения точки, скорости и направления движения. Они позволяют определять плановое положение точки, как правило, с точностью до единиц м, а высотное положение определяется с точностью порядка 10 м. (Двухчастотные кодовые приемники обеспечивают субметровую точность). Для повышения точности высотных измерений в них встраивают баровысотомер. Эти приемники удобны при выполнении полевых географических и геологических работ, так как на экране можно отобразить карту маршрута, определять свое местоположение, расстояние, направление и время прибытия к цели. Полученные результаты могут накапливаться и храниться в памяти прибора, а затем вводиться в компьютер для дальнейшей обработки. Эти приемники имеют малые габариты и массу, работают в широком диапазоне температур и малоэнергоемки.
Современные GNSS приемники позволяют работать с системами ГЛОНАСС и GPS, одновременно принимая сигнал по универсальным каналам, что повышает точность и производительность выполняемых работ. За последние несколько лет системы высокоточного спутникового позиционирования стали неотъемлемой частью геодезических и маркшейдерских работ. Эти системы (ГИС GPS / Глонасс) используются при создании опорного геодезического обоснования, детальных топографических съемок, выносе проекта в натуру и т.д. Применение систем спутникового позиционирования ( GNSS / Glonass) позволяет существенно повысить точность и производительность полевых и камеральных геодезических работ, что значительно улучшает качество геодезического и маркшейдерского обеспечения предприятий. Определение пространственных координат в режиме реального времени предоставляет такие дополнительные возможности по автоматизации таких процессов, как разбивка строительных сеток, геодезический мониторинг инженерных сооружений (высотные здания, мосты, плотины и т.п.), наблюдения за пространственным положением больших промышленных механизмов. Компания Leica Geosystems (Швейцария) разработала новую серию Глонасс / GPS оборудования - Leica Viva GNSS. Отличительной чертой этой серии является способность принимать сигналы от спутников как существующих, так и проектируемых ГНСС на всех частотах (в т.ч. L5 системы GPS, GLONASS, Alt-Boc системы Galileo и др.). Для качественной работы спутниковой аппаратуры с гарантированно надежным приемом сигналов спутников GNSS в любых условиях были разработаны и запатентованы технологии SmartTrack+, SmartCheck+ и SmartRTK.
Основной задачей, решаемой с помощью GPS в геодезии, является создание и реконструкция опорных и съемочных сетей, а также крупномасштабная топографическая съемка обширных территорий, вынос в натуру проекта и др. В этих условиях важным является вопрос выбора пунктов государственной геодезической сети, от которых будет осуществляться привязка опорной геодезической сети. Как показывают исследования, предпочтительнее использовать пункты государственной геодезической сети более высокого класса, расположенные на удалении 5-15 км от промышленных предприятий. Это обусловлено тем, что пункты сети, базирующиеся вблизи промышленных объектов, находятся в зоне влияния техногенных факторов.
Одной из основополагающих характеристик для полевого геодезического оборудования является степень его защищенности. Оборудование Leica Viva GNSS имеет систему защиты, сертифицированную по Европейским стандартам. Система гарантирует полную защиту от пыли и 100% конденсированной влаги (IP67), рабочая температура составляет от -40˚С до +65˚С. Приборы выдерживают кратковременное погружение в воду на глубину до 1 м, падение с высоты 1,5 м на твердые поверхности, а также обеспечивают работу без потери сигнала в условиях сильной вибрации.
Как осуществить прием погодных карт по радио
Погода интересует всех и всегда, в том числе и радиолюбителей. Известный писатель как-то заметил, что москвичи при передаче сводки погоды словно сумасшедшие бросаются к приемнику. Но все же лучше смотреть про погоду по телевизору - там часто показывают карты, по которым можно делать и самостоятельные прогнозы.
А еще лучше тем, кто имеет доступ в Интернет. По адресам "www.meteo-tv.ru" и "meteo.infospace.ru" можно посмотреть спутниковые снимки земной поверхности и увидеть туже самую информацию, которой пользуется и Гидрометцентр.
Сервер SMIS (Space Monitoring Information Support), поддерживаемый Институтом космических исследований (ИКИ) четырежды в сутки обновляет карты облачности. Анимационные изображения позволяют наглядно проследить развитие атмосферных вихрей, циклонов, фронтов и т. д. На сервер можно выйти по адресу "smis.iki.rssi.ru".
Получать информацию из сети Интернет, конечно, хорошо, но гораздо приятнее самому принять карту погоды из эфира или со спутника. Задача, согласитесь, достойная и, как оказывается, вполне по силам для радиолюбителей.
Существует несколько способов приема информации о погоде в реальном времени. Для этого можно использовать:
- Карты погоды, регулярно передаваемые на КВ (APT Marine Fax);
- Ретрансляцию спутниковых данных наземными станциями на КВ;
- Передачи информации о погоде на КВ телетайпом (SYNOP Data, RTTY);
- Передачи системы NAVTEX (RTTY 518 kHz);
- Сигналы геостационарных спутников (APT-WEFAX/PDUS);
- Сигналы низкоорбитальных спутников (WEFAX/HRDT).
Рассмотрим эти способы подробнее.
Карты погоды на КВ
Для передачи карт погоды на КВ используется известный способ факсимильной передачи изображенийпредусматривающий построчное сканирование. При этом на приемной и передающей сторонах должны быть установлены одинаковые скорости вращения барабана (RPM), что соответствует скорости передачи строк, и шаг между строками (ЮС).
Несоблюдение первого условия приводит к тому, что карта воспроизводится с нарушением вертикальной структуры (линии воспроизводятся под наклоном), а второго - к нарушению пропорций между вертикальными и горизонтальными размерами изображенных на ней объектов. Обычно значение RPM равно 120, а ЮС - 576 Станции, находящиеся в странах СНГ и Балтии, как правило, используют стандарт RPM = 60, IOC = 90 На коротких волнах можно также услышать и станции, передающие газетные полосы со стандартом RPM = 60, IOC = 352.
Для передачи сигнала применяется однополосная модуляция с частотно-модулированной поднесущей. При этом передатчик излучает частоту поднесущей, равную 1500 Гц при отображении черных объектов и 2300 Гц при отображении белых. При передаче полутоновых изображений частота поднесущей принимает промежуточные значения. Половина разности между частотами, отображающими белые и черные объекты, соответствует стандартной девиации частоты (400 Гц).
Для приема карт погоды на КВ нужно использовать однополосный приемник, установив на нем режим приема верхней боковой полосы. При этом, настраиваясь на станцию, необходимо установить частоту приемника на 1,9 кГц (среднее значение поднесущей) ниже частоты, приведенной в справочнике. Соединив низкочастотный выход приемника с входом звуковой карты компьютера и установив программу обработки изображения, удается наблюдать на экране карту погоды.
Частоты станций, передающих карты погоды на КВ, и расписание их работы можно узнать в Интернете по указанному ниже адресу.
Ретрансляция спутниковых данных на КВ
Несколько станций в разных местах планеты (USCG, Токио, Гонолулу, Тайбей и Дели-Метео) ретранслируют на КВ карты погоды, передающиеся с геостационарных спутниковGOES и GMS в стандарте RPM = 120, IOC = 576. При этом число градаций яркости равно 256.
Передача обзорной информации на КВ телетайпом
Несколько метеорологических станций круглосуточно передают обзорную информацию о погоде телетайпом Для приема этой информации нужны однополосный приемник и компьютер со звуковой картой или телетайпным модемом и соответствующая программа декодировки.
Система NAVTEX
Для обеспечения безопасности судов в прибрежных водах информация о погоде передается через международную систему NAVTEX, функционирующую на частоте 518 кГц телетайпом в стандарте SITOR-B. При этом для устранения взаимных помех всестанции NAVTEX передают одну и ту же информацию в режиме временного разделения и регулировки мощности.
Каждое сообщение в системе NAVTEX начинается с четырехсимвольного заголовка (В1 В2 В3 В4). Первый символ (В 1 ) - это буква, играющая роль идентификатора станции в системе. В зависимости от географического положения судна и условий приема аппаратура автоматически принимает решение о том, информацию с каких станций принимать и обрабатывать, а с каких - нет.
Система NAVTEX построена таким образом, что любая другая станция с аналогичным идентификатором расположена заведомо за зоной уверенного приема, составляющей около 400 морских миль. Второй символ заголовка (В2) определяет класс сообщения.
На каждом из судов заранее программируются классы сообщений, которые будет принимать его аппаратура Сообщения других классов отфильтровываются. Третий и четвертый символы заголовка (В3 и В4) представляют собой порядковый номер сообщения.
Для приема сигналов системы NAVTEX необходимы однополосный приемник, настраивающийся на указанную частоту, и компьютер со звуковой картой или телетайпным модемом и соответствующим программным обеспечением.
Система передачи погодных факсов WEFAX
WEFAX (Weather Facsimile) представляет собой разновидность факсимильной передачи, ориентированную на передачу погодных карт. В настоящее время три спутниковые системы осуществляют передачу в этом стандарте GOES (США), Meteosat (Европейское Сообщество), а также GMS (Япония) WEFAX дает возможность принимать монохромное изображение аналоговым способом в звуковом канале приемника.
В зависимости от конкретного стандарта изображение передается со скоростью от нескольких сотен до нескольких тысяч точек в секунду. Изменение уровня яркости передается изменением значения поднесу щей частоты передатчика.
Земля сканируется каждые полчаса, и данные поступают на наземную станцию, оборудованную полутораметровой параболической приемной антенной и другими достаточно сложными устройствами Получаемые данные обрабатываются в реальном времени. При этом на них накладывается изображение политических границ государств. Затем данные передаются обратно на спутник, который ретранслирует их на землю на частоте 1691 МГц.
“Картинка”, передаваемая в стандарте WEFAX, представляет собой аннотированное изображение с разрешением 800 на 800 точек На передачу каждой строки затрачивается 250 мс, таким образом, полное изображение передается три с половиной минуты.
Существует точное расписание, по которому можно определить, когда, какое изображение и по какому каналу передается со спутника.
Интерпретация изображений
Радиометры, устанавливаемые на метеорологических спутниках, измеряют интенсивность излучения в различных участках спектра электромагнитных волн, называемых “атмосфернымиокнами прозрачности". Излучение в таких “окнах" не подвергается сильному ослаблению в атмосфере.
В видимом спектре наблюдают облачность. Участки белого цвета на полученных изображениях соответствуют облачности, в то время как темные - ее отсутствию. Чем толще слой облаков, тем выше его отражающая способность и тем белее он будет выглядеть.
Важен для изучения погоды как днем, так и ночью ИК диапазон. Инфракрасные изображения, передающиеся со спутников в псевдоцветах, показывают распределение температуры по поверхности Земли. Как правило, чем темнее тот или иной участок - тем он теплее и наоборот.
Низкая облачность очень часто способствует повышению температуры.
По изображениям, получаемым в спектре поглощения водяных паров, определяют уровень влажности в том или ином месте. Такие изображения содержат информацию о раскручивающихся тропосферных вихрях и тропосферных потоках Более темные участки изображения в этом случае соответствуют более сухим участкам на земной поверхности, и наоборот.
Геостационарные спутники
В настоящее время, в соответствии с программой запуска Европейских геостационарных спутников, работает METEOSAT 7. Высота орбиты этогоспутника составляет около 36000 км, и он как бы “висит" над одной и той же точкой Земли, находящейся на экваторе.
Главной особенностью данных, получаемых с геостационарных спутников, является оперативность, поскольку каждые 4 минуты передается новый блок данных Каждые полчаса производится сканирование поверхности Земли. Затем данные группируются поблочно и передаются на Землю.
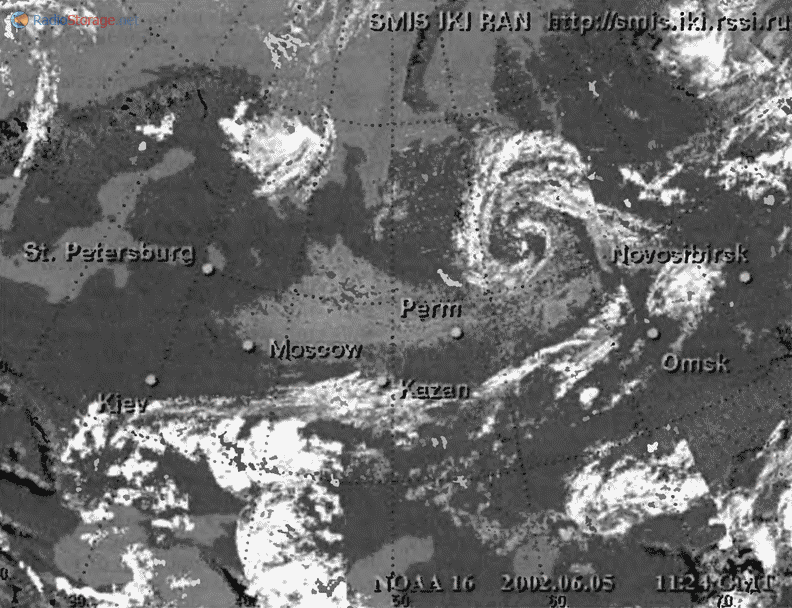
Рис. 1. Пример карты погоды.
Поскольку спутник неподвижен относительно поверхности Земли, возможна анимация погодных карт, где, как в кинофильме, наглядно видно движение массивов облачности и других изображенных на картах погодных объектов.
Изображения поверхности Земли, видимой со спутника, передаются по каналу № 2 спутника. Они называются Всемирными и идентифицируются как CTOT, DTOT или ETOT. Первые буквы идентификаторов С, D и E обозначают изображения в видимом инфракрасном спектре и спектре поглощения водяных паров соответственно.
Всемирные изображения делятся на 9 сегментов, передающихся с более высоким разрешением. Сегменты передаются по каналу №1 каждые четыре минуты и идентифицируются как С1; С2 . D1; D2 . ; Е1; Е2 .
При этом назначение буквы такое же, как и в предыдущем случае а цифра - это номер сегмента.
Геостационарные спутники “видят” друг друга и могут обмениваться данными Поэтому с Метеосата можно получить информацию, пришедшую с российского спутника GOMS, японского GMS, а также американского GOES East, что дает практически полное покрытие поверхности Земли. Полученные изображения обрабатываются в реальном времени, оцифровываются и направляются в центры предсказания погоды.
Сканирование изображения в горизонтальной плоскости обеспечивается за счет вращения спутника вокруг своей оси со скоростью 100 оборотов в минуту. Сканирование в вертикальной плоскости с периодом, составляющим 20 минут, производится с помощью подвижного зеркала.
Первичные данные передаются на землю с большим разрешением в цифровом виде, что требует специального оборудования для их приема. Наземные высокоскоростные компьютеры обрабатывают эти данные, решая две задачи. Во-первых, исходные данные ретранслируются в другом цифровом формате, обладающем меньшим разрешением.
Во-вторых, сформированные на спутнике изображения делятся на отдельные квадранты и ретранслируются в аналоговом виде в стандарте WEFAX.
Изображения, полученные с геостационарных спутников, используются для отслеживания движения циклонов и фронтов, облачных массивов (см рисунок). Характеристики ветров определяются по движению облачности. Дожди оцениваются по наблюдаемым грозам и бурям По этим же признакам выдаются штормовые предупреждения Изображения дают возможность оценить запасы снега в конкретном районе и общую площадь снежного покрова.
Страны, обладающие большой территорией и не имеющие возможности запустить собственный спутник, могут пользоваться первичной информацией со спутников других стран. Так, Австралия по двустороннему соглашению с Японией имеет полный доступ в реальном времени ко всем данным японских геостационарных метеорологических спутников (GMS). Сейчас из этой серии работает GMS-5, занимающий позицию 140 градусов восточной долготы и покрывающий Восточную Азию, западную часть Тихого океана и Австралию.
Так же, как и на КВ, для автоматического приема сигналов со спутников используется стандарт APT (Automatic Picture Transmission).
Низкоорбитальные спутники
Карты погоды можно принимать и с низкоорбитальных спутников, движущихся по полярным орбитам. Этот вариант может оказаться самым удобным и дешевым, хотя заведомо имеет некоторые ограничения.
Весь комплект аппаратуры в этом случае может состоять из УКВ антенны (подходит даже проволочный диполь или вертикальный штырь), приемника ЧM сигналов с диапазоном 137 МГц, компьютера со звуковой картой и соответствующим программным обеспечением.
Размещено на реф.рф
Винтовая антенна состоит двух бифилярных спиральных петель, ортогонально ориентированных на общей
оси. Как и предыдущие антенны, она также имеет всенаправленную диаграмму и предназначена для приема сигналов с правосторонней круговой поляризацией. Этот тип антенн имеет больший коэффициент усиления сигналов на малых и средних высотах спутников, хотя влияние многопутности для них будет больше. Обычно GPS антенны защищены от возможных повреждений пластиковым кожухом (куполом) из радио прозрачной пластмассы, которая минимально ослабляет сигналы. Эти сигналы очень слабые; они имеют примерно ту же силу, что и сигналы от геостационарных TV спутников.
Причина, по которой GPS приемнику не нужна антенна с размерами телевизионных тарелок, кроется в структуре сигнала GPS и способности приемника сужать ее. Способность извлекать сигнал GPS из общего Одна и та же антенна может обслуживать два или более приемников, в случае если используется разветвитель (сплиттер). Разветвитель должен пропускать к предусилителю постоянный ток только от одного из всех приемников и должен обеспечить определенный уровень изоляции между портами приемников так, чтобы между ними не было никаких взаимных помех. Линии передач. Сигналы, принятые антенной, поступают в приемник по коаксиальной линии передач (кабелю). При прохождении сигналы ослабляются, степень ослабления (внутренние потери), зависят от типа и длины используемого кабеля. Для длинных линий передач необходимы кабели с малыми потерями, иначе между антенной и кабелем нужно ставить
дополнительный малошумящий предусилитель. Сигналы, проходя от антенны к приемнику, испытывают небольшую задержку. При этом эта задержка является одинаковой для сигналов, принятых одновременно от разных спутников, и в связи с этим она действует как
дополнительное смещение шкалы часов приемника
Работа радиочастотного блока в GPS/ГЛОНАСС приемнике состоит в переводе радио частоты (РЧ), прибывающей на антенну, к более низкой частоте, называемой промежуточной частотой (ПЧ), которой легче управлять в других блоках приемника. Основными элементами радиочастотного блока являются: генератор опорной частоты, умножители для получения более высоких частот, фильтры для подавления ненужных частот и смесители. Промежуточная частота получается путем перемножения в смесителе
входного сигнала с чистым синусоидальным сигналом, генерируемым составной частью приемника, известной как вспомогательный генератор (гетеродин). Большинство спутниковых приемников используют точные кварцевые генераторы, выполняющие роль регуляторов электронных часов. В результате получается сложное колебание y из низкочастотной f1−f2 и высокочастотной f1+f2 составляющих. После прохождения низкочастотного фильтра высокочастотная составляющая подавляется. Оставшийся сигнал с низкой частотой обрабатывается. Разность частот f1 –f2 принято называть частотой биений или промежуточной частотой (ПЧ). Она легче обрабатывается, чем сигналы с высокой частотой. Сигналы ПЧ содержат все модуляции, которые присутствуют в передаваемом сигнале, изменяется только частота несущей. Большинство приемников используют несколько этапов, понижая частоту несущей по шагам. Конечный сигнал ПЧ становится рабочей частотой приемника в системах слежения за сигналом. Всенаправленная антенна GPS приемника принимает сигналы от всех спутников, находящихся выше горизонта антенны. Приемник должен уметь выделять сигналы каждого отдельного спутника, чтобы измерять кодовые псевдодальности и фазу несущей. Разделение достигается через использование в приемнике ряда сигнальных каналов. Сигналы от разных спутников легко различаются по передаваемому ими уникальному C/A
(стандартному) коду или части Р кода, и закрепляются за отдельным каналом. Канал в приемнике можно использовать одним из двух базовых способов. Приемник может иметь выделенные каналы, на которых непрерывно наблюдаются отдельные спутники. Для определения трех координат пункта и поправки часов приемника крайне важно минимум четыре таких канала на L1 для четырех спутников. Дополнительные каналы позволяют наблюдать больше спутников или проводить наблюдения на частоте L2, необходимые для определения ионосферной задержки, или делать обе операции. Приемник использует свои каналы слежения для измерения псевдодальностей и для извлечения навигационного сообщения. Это делается с помощью цепей слежения. Цепь слежения представляет собой устройство, ĸᴏᴛᴏᴩᴏᴇ позволяет приемнику ʼʼнастраиватьсяʼʼ или следить за сигналом, который изменяется либо по частоте, либо по времени. Оно представляет собой прибор с обратной связью, в котором входящий (внешний) сигнал сравнивается с локально созданным (внутренним) сигналом. В случае если сигналы не совпадают, то генерируется сигнал ошибки, который является разностью между ними. Этот сигнал используется для сдвига внутреннего сигнала для того, чтобы он совпал с внешним сигналом таким образом, чтобы ошибка уменьшилась до нуля или была минимизирована. Приемник GPS использует два вида цепей слежения: цепи для захвата задержки (для слежения по кодам) и цепи для слежения за несущей. Цепь захвата задержки используется для совмещения псевдослучайного шума (PRN), который присутствует в сигнале, приходящем от спутника, с идентичным сигналом, который генерируется в приемнике по тому же самому алгоритму, что и на спутнике Корреляционный компаратор в цепи захвата задержки непрерывно проводит кросс-корреляцию двух потоков кодов. Это устройство выполняет процессы умножения и сложения, которые образуют сравнительно большой выход только тогда, когда потоки кодов совмещены. Временной сдвиг (иногда принято называть фазой кода), необходимый для совмещения последовательностей кодов, в принципе, равен времени, крайне важно му для распространения от спутника к приемнику. Умножение этого временного интервала на скорость света дает расстояние или дальность
до спутника. Но поскольку часы в приемнике и на спутнике в общем случае не синхронизированы и идут с несколько разным ходом, то измерения дальностей оказываются смещенными. Эти смещенные дальности называют псевдодальностями. Поскольку чипы в последовательности кодов спутника генерируются в точно известные моменты времени, совмещение последовательностей кодов спутника и приемника также дает отсчет по часам спутника в момент генерации сигнала. Измеренная величина фазы биений несущей получается, в принципе, просто отсчетом числа прошедших циклов и измерением дробной фазы захваченного сигнала локального генератора. Измерение фазы, когда оно преобразуется в единицы расстояния, оказывается тогда неоднозначным измерением дальности до спутника. Эта неоднозначность происходит из-за того, что GPS приемник не может отличать один цикл несущей от другого, и, следовательно, предполагает произвольное число полных циклов начальной фазы, когда она первый раз захватывает сигнал. В случае если наблюдение фазы используется для позиционирования, то эта начальная неоднозначность должна разрешаться математически вместе с определением координат приемника. Поскольку неоднозначность является постоянной, пока приемник сохраняет захват принятого сигнала, скорость изменения фазы несущей свободна от этой неоднозначности. Эта величина принято называть доплеровским сдвигом сигнала спутника, и она используется, к примеру, для определения скорости движущегося приемника, когда он находится на самолете, судне и других средствах.
Геодезические спутниковые приёмники - понятие и виды. Классификация и особенности категории "Геодезические спутниковые приёмники" 2017, 2018.
Оценка воздействия космической погоды на синхронизацию времени в системе мониторинга переходных режимов Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Успенский М.И.
При управлении электроэнергетической системой для определения векторов тока и напряжения применяют технику на основе меток времени от глобальных навигационных систем с целью синхронизации момента измерений в различных ее узлах. В статье рассмотрены пути определения таких моментов, погрешности, вызываемые различными причинами природы используемой методики, даны некоторые оценки воздействия космической погоды на точность момента измерений. Сделан вывод об ограниченности применения подобной техники в управлении энергосистемой.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Успенский М.И.
SPACE WEATHER IMPACT ESTIMATE ON SYNCHRO- NIZATION FOR WAMS
The equipment based on the global navigation system timestamp is applied to synchronize the measurement moment in various power buses to define the current and voltage phasors at the power system control. There is a number of the natural reasons which reduce synchronization accuracy. These are irregularities in an ionosphere layer due to solar radiation, geomagnetic storms, mutual disposition of the navigation signal satellites and receivers, the final equipment accuracy in receiving and signal processing. In this paper the ways of such moments and the errors caused by various reasons of the nature on used equipment are considered, some estimates of space weather impact on the measurement moment accuracy are given. The conclusion about limited use of such equipment in power system control is made.
Текст научной работы на тему «Оценка воздействия космической погоды на синхронизацию времени в системе мониторинга переходных режимов»
УДК 621.316: 681.3
ОЦЕНКА ВОЗДЕЙСТВИЯ КОСМИЧЕСКОЙ ПОГОДЫ НА СИНХРОНИЗАЦИЮ ВРЕМЕНИ В СИСТЕМЕ МОНИТОРИНГА ПЕРЕХОДНЫХ РЕЖИМОВ
Институт социально-экономических и энергетических проблем Севера
ФИЦ Коми НЦ УрО РАН, г. Сыктывкар
При управлении электроэнергетической системой для определения векторов тока и напряжения применяют технику на основе меток времени от глобальных навигационных систем с целью синхронизации момента измерений в различных ее узлах. В статье рассмотрены пути определения таких моментов, погрешности, вызываемые различными причинами природы используемой методики, даны некоторые оценки воздействия космической погоды на точность момента измерений. Сделан вывод об ограниченности применения подобной техники в управлении энергосистемой.
Ключевые слова: глобальные навигационные системы, СМПР, космическая погода, погрешности момента измерения
M.I. USPENSKY. SPACE WEATHER IMPACT ESTIMATE ON SYNCHRONIZATION FOR WAMS
The equipment based on the global navigation system timestamp is applied to synchronize the measurement moment in various power buses to define the current and voltage phasors at the power system control. There is a number of the natural reasons which reduce synchronization accuracy. These are irregularities in an ionosphere layer due to solar radiation, geomagnetic storms, mutual disposition of the navigation signal satellites and receivers, the final equipment accuracy in receiving and signal processing. In this paper the ways of such moments and the errors caused by various reasons of the nature on used equipment are considered, some estimates of space weather impact on the measurement moment accuracy are given. The conclusion about limited use of such equipment in power system control is made.
Keywords: Global navigation systems, WAMS, space weather, measurement moment errors
В последнее время в управлении производством электроэнергии используются метки времени от глобальных навигационных систем (ГНС) для синхронизации момента измерений в различных узлах крупных систем с целью получения фазовых сдвигов измеряемых сигналов. Здесь важным является точность в одновременности момента измерений, т.е. чтобы передаваемая с величинами измерений метка времени в различных точках была максимально синхронизирована для всех измерений. Телеметрия, принятая диспетчерским центром и обработанная оперативно-информационным комплексом с учетом меток времени, позволяет диспетчеру получить полную картину развития событий в случае аварий или нештатных ситуаций. Точ-
ность отсчета времени приобретает еще большее значение в системах мониторинга с применением векторных измерений. Связь точности синхронизации по времени с погрешностью по углу измерения
определяется как At |мкс| = —-—----г , отку-
да для 50 Гц погрешность угла менее 1 мин. требует точности синхронизации 0.926 мкс. Согласно требованиям стандартов [1], для задач электроэнергетики необходимо поддерживать одновременность замеров на уровне 1 мкс.
Глобальные навигационные системы (ГЛО-НАСС - глобальная навигационная спутниковая система России, GPS - Global Positional System, система глобального позиционирования США) обеспечивают не только определение географических ко-
ординат, но и точную синхронизацию часов приемников спутниковых сигналов для организации обеспечения единого времени в системах учета электроэнергии, телемеханики, АСУ ТП и релейной защиты и автоматики.
Причины исследований в рассматриваемой области подробнее изложены в работе [2]. Здесь остановимся на некоторых численных оценках воздействия природных явлений на синхронизацию времени в СМПР или в зарубежной литературе WAMS (система мониторинга переходных режимов -Wide Area Measurement System), которая построена на УСВИ или в зарубежной литературе PMU (устройство синхронизированных векторных измерений - Phasor Measurement Unit). Работа СМПР базируется на отметках времени, поставляемых глобальными навигационными системами типа ГЛО-НАСС или GPS.
Причины и оценка ошибки синхронизации. Сначала рассмотрим причины появления ошибок в синхронизации времени. Заметим, что при высоте спутника ГЛОНАСС 19 100 км и его нахождении непосредственно над приемником время распро-
странения сигнала составляет -= 63.67 мс,
где с= 300 000 км/с - распространения радиосигнала. Очевидно, что при нахождении спутника под углом к приемнику эта величина возрастает. Так, если угол возвышения удаленного спутника составляет a = 20°, то при радиусе Земли г = 6366 км и высоте спутника непосредственно над приемником h = 19100 км разность во времени прохождения сигнала от спутников С и В до приемника А At составит (рис.1):
Рис. 1. Разность времени прохождения сигнала. Fig. 1. A time difference of signal passing.
ZBAO = 180° - (90° - Za) = 110° ;
r • sin ZBAO 6366 • sin110°
r + h 6366 +19100
ZBOA = 180° -110° -13.58° = 56.42°;
(r+h)sin ZBOA (6366 + 19100)sin56.42° AB =-=-= 22578 км;
д/ = 22578 -19100 = 3478км ; Л =д//с = 3478000/300000 = 11.6 мс.
Как позиция приемника, так и синхронизация времени для него определяются при известных точном времени на спутнике и скорости распространения сигнала от спутника к приемнику. Рассмотрим это на простом примере (рис.2). Все необходимые переменные, связанные с приемником, а именно позиция L1 и временная поправка At распространения сигнала вычисляются с учетом времени его распространения ^ и известном расстоянии между спутниками L2 при известной скорости распространения сигнала с = 300000 км/с. L2 определяется по известным координатам спутников [3].
Рис. 2. Определение позиции приемника и времени распространения сигнала до него. Fig. 2. A receiver position definition and signal propagation time to it.
Для позиции на линии достаточно источников сигнала двух спутников
L2 + (¿1 - t2 ) • С 2 '
Для позиции на плоскости требуются три источника, а в пространстве - четыре. Следовательно, для определения расстояния и времени распространения сигналов спутников в 3-мерном пространстве должно наблюдаться не меньше четырех спутников. Заметим, что реально в отсутствии помех (гор, строений или зарослей) можно видеть до пяти . шести спутников. Расстояние до /-го спутника можно определить как R, = t/«c. Но поскольку известны координаты только спутников, то расстояние до него в 3-мерном пространстве
Ri Xcn.i -Xnp.) +(■Ycn.i -Ynp.) +(Zcn.i -Znp.) + с •At ,
где неизвестные переменные позиции приемника Хпр. Ynp. Znp. и погрешность времени распространения At, т.е. необходима система с не менее, чем 4 уравнениями. Поскольку реально с позиции приемника наблюдается больше спутников, то систему можно решать методом наименьших квадратов. В
результате получаем расстояния до спутников Я, по которым можно вычислить и время распространения ti =Ri/ c+At, необходимое для коррекции момента пуска АЦП устройства синхронизированных векторных измерений.
Понятно, что все известные значения находятся с определенной ошибкой. Ниже перечислены причины появления ошибок:
- Данные по позиции спутника известны с точностью до 1 + 5 м.
- Часы спутника. При стабильности генератора 10-13 ошибка часов за сутки без учета релятивистских явлений составляет примерно 10 нс. Их учет рассмотрен ниже.
- Влияние ионосферы. Ионосфера является частью атмосферного слоя между 60 и 1000 км над поверхностью Земли. Молекулы газа в ионосфере положительно ионизированы. Ионизация, в основном, вызвана солнечным излучением (только во время дня!). Определенное влияние на ионизацию оказывают геомагнитные возмущения в годы активности Солнца. Если сигналы от спутника проходят через вакуум со скоростью света, то в ионосфере скорость этих сигналов замедляется и, следовательно, более не является константой. Уровень ионизации меняется в зависимости от времени и места, усиливается днем и на экваторе, а также под влиянием солнечных штормов. Если влияние ионизации известно, то данный эффект можно компенсировать геофизическими коррекционными моделями. Кроме того, если скорость сигнала зависит от частоты, дополнительно можно сделать коррекцию с помощью двух частот приемника УСВИ, поскольку, чем выше частота, тем сильнее задержка сигнала. Следовательно, можно скорректировать скорость прохождения радиосигнала через ионосферу.
- Влияние тропосферы. Тропосфера является частью атмосферного слоя между 0 и 15 км над поверхностью Земли. Возникновение ошибок здесь обуславливается изменением плотности молекул газа и влажности воздуха. Плотность уменьшается с увеличением высоты. Увеличение плотности или влажности замедляет скорость сигналов спутника. Для коррекции данного эффекта используется простая модель на основе стандартной атмосферы (Р) и температуры(Т):Н - высота, м; Т = 288.15°К - 6.5-10"3-Н, °К; Р = 1013 мбар (Т/288.15°К)5256, мбар.
- Отражение. Сигналы спутников отражаются от зданий, деревьев, гор и т.д. и отклоняются перед получением приемником. Сигнал искажается из-за интерференции. Эффект отражения сигналов можно частично компенсировать выбором места расположения (без отражателей), хорошей антенны и времени измерения (рис. 3).
- Влияние приемника. Дальнейшие ошибки возникают из-за шума измерений приемника УСВИ и задержек по времени в приемнике. Сюда же входят так называемые радиопакеты, радиошумы, производимые электромагнитными процессами на Солнце, которые существенно снижают отношение "полезный сигнал/шум". Современные технологии позволяют учесть такое влияние.
Позиция момента Т
сигнал не принимается
Отраженный сигнал ' принимается
Рис. 3. Наложение отраженного сигнала из-за позиции спутника.
Fig. 3. A reflected signal interference because of a satellite position.
- Влияние взаиморасположения спутников с учетом их возможного затенения (DOP -dilution of precision - «снижение точности»). Точность любого измерения пропорционально зависит от величины DOP. Это означает, что если увеличить DOP вдвое, то ошибка в определении позиции возрастет также в два раза. Значение DOP является обратной величиной по отношению к объему четырехгранника, образованного позициями спутников и приемника. Наилучшее геометрическое расположение при максимальном объеме, и, следовательно, минимальном показателе снижения точности DOP. В работе J.-M.Zogg [2] дана таблица оценочных погрешностей по перечисленным причинам (табл. 1).
Оценки погрешностей Estimates of errors
Таблица 1 Table 1
Причина погрешности Величина погрешности в позиции, м Величина погрешности во времени, мкс Доля погрешности
Данные по позиции 2.1 7 0.195
Часы спутника 2.1 7 0.195
Влияние ионосферы 4.0 13.3 0.370
Влияние тропосферы 0.7 2.3 0.065
Влияние приемника 1.4 4.7 0.130
Влияние взаиморасположения спутников с учетом их возможного затенения 0.5 1.7 0.045
Общее среднеквадратичное значение 5.3 17.5 1.0
Таким образом, причины погрешности точного времени при передаче его сигналов от спутника к приемнику следующие: задержки в аппаратуре источника и приемника, время распространения радиосигнала от источника к приемнику, фазовые сдвиги из-за явлений отражения и преломления в ионосфере и тропосфере Земли, отставание или замедление времени на борту спутника из-за погрешности датчика времени и релятивистских явлений.
Задержки также делятся на детерминированные и недетерминированные. Первые измеряются при подготовке аппаратуры и затем учитываются при синхронизации бортового источника времени с
эталонным источником времени на Земле. Такая синхронизация происходит один-два раза в сутки. Детерминированные погрешности в приемниках также измеряются и учитываются при работе. Погрешность недетерминированной задержки не превышает ±2нс [4]. Вклад в погрешность времени из-за релятивистских явлений (разностью времени, отсчитываемой часами на Земле и часами на борту движущегося спутника) оценен в работе С.Н. Филимонова [5], и на широте Москвы часы спутника опаздывают относительно наземных часов на 0.43 нс за каждую секунду или за 39 мин примерно на 1мкс. Следовательно, коррекция часов спутника должна выполняться с интервалом не более 36 мин, чтобы погрешность расхождения часов не превышала требуемые ±926 нс. Здесь следует отметить, что при единообразной коррекции эта погрешность не имеет заметного значения, поскольку в задачах СМПР важны не столько точность величины времени, сколько одновременность момента измерений в разных узлах большой системы.
Влияние геомагнитных штормов на синхронизацию. Выше отмечалось, что одной из причин появления ошибки синхронизации является геомагнитный шторм - нарушение в магнитосфере
Земли, управляемое изменениями в солнечном ветре [6]. Таким штормом управляет один из высокоскоростных потоков (вспышки мягкого и жесткого рентгена), либо поток извлечения массы короны, причем последний приводит к более существенным воздействиям. При оценке среднего времени до следующего события в вычислении вероятности возниковения при распределениях Бернулли, т.е. независимых событий, либо происходящих, либо нет с постоянной вероятностью возникновения, можно получить как
где т - среднее время между событиями, т.е. сумма промежутков времени между событиями на число этих промежутков.Уровни активности Солнца хорошо отражаются количеством солнечных вспышек по датам (рис. 4). Он дает представление о том , в какие промежутки активности Солнца мы получим оценки вероятности возникновения штормовых геомагнитных возмущений. Диапазоны по датам и нижние уровни значения Dst, характеризующего величину шторма, к соответствующим вероятностям приведены в табл. 2 и показаны на рис. 5.
Рис. 4. Уровни активности Солнца по солнечным вспышкам (Использована база данных [7]). Fig. 4. The Sun activity levels on solar flashes (The database [7] is used).
01.01.1989 - 31.01.2018 01.01.1990-31.01.2001
m 111 mi пшпрпг
' irr ' mlr11 'Hi1' iiir lit i Г "ir 11'
Рис. 5. Значения |Dst| за период 01.01.1950 31.01.2018 (Использована база данных [7]). Fig. 5. |Dst| values during 01.01.1950 ^ 31.01.2018 (The database [7] is used).
Таблица 2 Оценка вероятности возникновения геомагнитных возмущений
Probability estimate of geomagnetic disturbance emergence
Из таблицы видно, что для уровня штормов в 300 нТл вероятность такого возмущения в день составляет в среднем 10%, не сильно отклоняясь в различные периоды солнечной активности (8.8^ 11.2%). При уровне |Dst| в 600 нТл вероятность этого события лежит в диапазоне 16.9^37.5%, но уже в год. В периоды штормов от 300 нТл можно ожидать перерывов в связи с ГЛОНАСС, но здесь важна еще длительность такого перерыва, поскольку при коротких перерывах спасает местный источник точного времени, который синхронизировался по каждой временной метке спутников. Его стабильность обычно лежит в диапазоне 10-6 ^10"12, что позволяет пропустить метки спутников в течение нескольких минут в зависимости от стабильности генератора приемника. Так, при стабильности генератора 10-10 погрешность в 1 мкс наступит уже через 2.8 ч. В табл. 3 даны вероятности того, что событие с |Dst|> 300 нТл продлится более 3 ч за различные периоды наблюдения.
Оценка вероятности продолжительности геомагнитных возмущений от 3 ч и более
Probability estimate of geomagnetic disturbance duration for 3 and more hours
Диапазон Dst|, нТл P(x), соб./год Максимальный промежуток, часы
01.01.1950-28.02.2018 300 0.102 12
01.01.1989-28.02.2018 300 0.274 6
Другие причины природного воздействия на синхронизацию. Генератор приемника спасает и в случае прохождения грозы или присутствия солнечных радиопакетов (СРП), когда связь со спутниками ГЛОНАСС может прерываться на короткое время. Подобное влияние СРП на глобальные навигационные системы было отмечено в первый раз 5 декабря 2006 г. при солнечном минимуме. Этот пакет был величиной в 1 млн солнечных флюксов (один солнечный флюкс =1022 Втм2Гц"1); 6, 13 и 14 декабря в том же году зафиксированы
события с меньшими потоками. Энергия на частотах ГЛОНАСС была достаточна для вмешательства в работу приемника информации в течение 10 + 20 мин в каждом случае. Данные по позиции нескольких приемников плохо раскодировались (из-за неустойчивости связи) и были потеряны [8]. Следуя приблизительно на 12^24 ч позади быстрых воздействий, эти пакеты представляли плазменные частицы, связанные с выбросом солнечной короны. Последние косвенно приводят к возмущениям в ионосферной электронной плотности на значительных площадях Земного шара и вызывают крупномасштабные (на10^1000 км) структуры и градиенты, подобные волне, в ионосфере. Генерируются также небольшие структуры (меньше чем 1 км), и они вызывают сцинтилляцию (т.е. быстрые изменения по амплитуде и фазе) сигналов. Сцинтилляции* производятся сигналами, рассеянными в ионосфере из-за упомянутых выше ее неравномерностей, так называемых "пузырей" (рис. 6). Такие колебания обычно происходят в экваториальных и высоких широтах, где они представляют серьезную проблему. Во время экстремальных событий космической погоды ионосферная сцинтилляция может наблюдаться и в средних широтах в глобальной форме.
Рис. 6. Влияние ионосферных неравномерностей на отношение сигнал/шум.
Fig. 6. Ionospheric irregularity impact on the signal/ noise factor.
Амплитудная сцинтилляция, вызывающая быстрые изменения в соотношении полезный сигнал-шум, может привести к потере сигнала во всех приемниках. Фазовая сцинтилляция, достаточно нару-
* Сцинтилляция - (от лат. scintillatio - мерцание), кратковременная (10 -4 . 10 -9 с) вспышка, возникающая при взаимодействии заряженных частиц солнечного вещества с ионосферой Земли при солнечных штормах.
Диапазон |Dst|, нТл Т, дней P(x) Примечание
01.01.195028.02.2018 300 8.5 0.105 1/день За период 67 лет
01.01.195028.02.2018 600 1380 0.209 1/год За период 67 лет
01.01.198928.02.2018 300 10.4 0.088 1/день За 28 последних лет
01.01.198928.02.2018 600 1404 0.206 1/год За 28 последних лет
01.01.199001.01.2001 300 7.9 0.112 1/день Между 2 минимумами
01.01.199001.01.2001 600 1794 0.169 1/год Между 2 минимумами
01.01.199601.01.2007 300 10 0.091 1/день Между 2 максимумами
01.01.199601.01.2007 600 607 0.375 1/год Между 2 максимумами
шающая фазу полезного сигнала, заставляет фазо-отслеживающий цикл приемника терять блокировку, влияющую на прием важного навигационного сообщения данных, включающего спутниковые эфемериды (данные о положении спутника). Цикл отслеживания кода, измеряющего расстояние до спутника, довольно устойчив к фазовой сцинтилляции и обычно остается заблокированным. Потеря фазной привязки приемника, используемая в высоко интегрированных приложениях, особенно важна, поскольку эти приемники должны регулярно считывать спутниковое сообщение данных. Для смягчения этого спутник базируется на системах приращения, использующих длину символов сообщения в 500 символов в секунду, вместе с длиной половины кодера и повторения сообщений при ошибках пакета сообщения.
К сожалению, оценки разрушения сообщений ГНС, вызванного сцинтилляцией, связанной с суперштормом, плохие. Существующее предположение представляет полную потерю обслуживания сроком на один день, однако весьма вероятно, что будут периоды, когда, по крайней мере, одна группа спутниковых сигналов может быть получена, и синхронизация времени восстановлена. Для критической инфраструктуры рабочее предположение расширено на перерыв обслуживания сроком до трех дней и включает допуск на реинициализацию совокупности спутников (или системы приращения) после шторма.
Современные электроэнергетические системы и, в первую очередь "умные" сети, используют временные метки глобальных навигационных систем для синхронизации измерения векторов токов и напряжений. Однако существует ряд природных и технических явлений, отрицательно воздействующих на выполнение такой функции ГЛОНАСС. К природным явлениям относятся геомагнитные бури, сцинтилляции, грозы, а к техническим можно отнести надежность функционирования технических средств ГНС, в том числе, погрешности измерения времени, окружение антенн приемников сигнала спутников ГЛОНАСС. Оценка вероятности событий, связанных с геомагнитными штормами по базе данных [7], показала, что можно ожидать возмущения при |Dst| > 300 нТлот 38 до 76 событий в год, а из них длительностью более 3 ч один раз в 4. 8 лет. Такие оценки указывают на необходимость резервирования автоматики управления режимами электроэнергетических систем с использованием ГНС менее совершенными, но автономными системами, не привязанными к ГНС.
1. IEEE Standard for Synchrophasor Measurements for Power Systems IEEE. Std C37.118.1 2011.
2. Успенский М.И. Природные проблемы синхронизации времени в системе МПР // Методические вопросы исследования надежности больших систем энергетики. Вып. 67. Сыктывкар, 2016. С. 396-402.
3. Zogg Jean-Marie. GPS. Essentials of Satellite Navigation/u-blox AG, GPS-Compendium, 2009. 174 p. Available: https://www.u-blox.com.
4. Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. Навигационный радиосигнал в диапазонах L1, L2 с открытым доступом и частотным разделением. М.: РНИИ КП, 2008. 74 с.
5. Филимонов С.Н. О некоторых проблемах синхронизации точного времени сигналами ГЛОНАСС // Технологии информационного общества. 2013. №7. С.130-132.
6. Riley P. On the probability of occurrence of extreme space weather events // Space Weather. 2012. Vol.10. Iss.2. P. 1-19. Available: https://onlinelibrary.wiley.com/doi/ 10.1029/ 2011 SW000734/full.
7. FTP Directory: ftp://ftp.ngdc.noaa.gov/STP/ GEOMAGNETIC_DATA/INDICES/KP_AP.
8. Walter T., Hansen A., Blanch J. and Enge P./ Robust Detection of Ionospheric Irregularities// Navigation. 2001. Vol.48. Iss.2. P. 89-100.
1. IEEE Standard for Synchrophasor Measurements for Power Systems IEEE. Std C37.118.1 2011.
2. Uspensky M.I. Prirodnye problemy sinhroniza-cii vremeni v sisteme MPR [Natural problems of time synchronization in WAMS] // Metodi-cheskie voprosy isslegovanija nadejnosti bol-shih system energetiki [Methodological issues of large power systems reliability]. Issue 67, Syktyvkar, 2016. P. 396-402
3. Zogg Jean-Marie. GPS. Essentials of Satellite Navigation / u-blox AG, GPS-Compendium, 2009. 174 p. Available: https://www.u-blox.com.
4. Globalnaja navigacionnaja sputnikovaja sistema GLONASS. Interfejsnyj kontrolnyj dokument. Navigacionnyj radiosignal v diapazonah L1, L2 s otkrytym dostupom i chastotnym razdele-niem [Global navigation satellite system GLO-NASS. Interface control document. A navigation radio signal in the ranges of L1, L2 with open access and frequency separation]. Moscow: RNII KP, 2008. 74 p.
5. Filimonov S.N. O nekotoryh problemah sinhro-nizacii tochnogo vremeni signalami GLONASS [About some issues of exact time synchronization by GLONASS signals]// Tehnologii infor-macionnogo obshestva [Technology of information soc.]. 2013. No.7.P. 130-132.
6. Riley P. On the probability of occurrence of extreme space weather events // Space Weather. Vol.10, Issue 2. P. 1-19. Available: https://onlinelibrary.wiley.com/doi/ 10.1029/2011 SW000 734/full.
7. FTP Directory: ftp://ftp.ngdc.noaa.gov/STP/ GEOMAGNETIC_DATA/INDICES/KP_AP.
8. Walter T, Hansen A., Blanch J., Enge P./ Robust Detection of Ionospheric Irregularities // Navigation. 2001. Vol.48. Issue 2. P. 89-100.