Погода в Санкт-Петербурге | Pogoda78.ru

Радиолокационная съемка
Радиолокационная съемка
Впервые РЛС в США и Советском Союзе была использована в 60-е годы для военных и метеорологических целей и для проводки судов в высоких широтах. С 1968 года в СССР для нужд геологии Лабораторией аэрометодов Министерства геологии СССР были начаты исследования по разработке методики площадной радиолокационной аэросъемки. Для этих целей применялись отечественные радиолокационные системы бокового обзора (РЛСБО) "Торос" и "Нить". Впервые радиолокационная съемка из космоса выполнена в 1978г. со спутника «Сиасат» с разрешением 25м, а в 1981г. с корабля многоразового использования «Шаттл» с разрешением 40м.
Круговой или секторный обзор применяют как в стационарных, так и в подвижных РЛС, если скорость носителя относительно невелика (рис.18). Боковой обзор используют только в бортовых РЛС на быстро перемещающихся платформах – самолетах, вертолетах, космических аппаратах. Неподвижный антенный луч ориентируется в сторону от направления полета и перемещается поступательно за счет собственного движения РЛС.
Зона бокового обзора имеет вид полосы. В двумерных РЛС (при обзоре земной поверхности) обычно используется веерообразный луч, так как разным дальностям соответствуют разные углы места. Оконечными устройствами РЛС бокового обзора обычно являются специальные фоторегистраторы, которые фиксируют на фотопленке изображение полосы обзора. В настоящее время для этой цели все чаще используются бортовые компьютеры. На рис. 19 приведена структура РЛС.
РЛС, предназначенная для активной радиолокации содержит передающую и приемную антенны (чаще используется одна приемо-передающая антенна (1), радиопередатчик (2) и радиоприемник (8), работающие в импульсном или непрерывном режиме, синтезатор частот и синхронизатор(3), устройство цифровой обработки сигналов (7),бортовой компьютер (4) и устройство отображения радиолокационной информации (5) – световой индикатор на электронно-лучевой трубке или монитор компьютера, вторичный источник питания (6).
Формирование РЛ-изображения. РЛ-изображение местности является результатом взаимодействия электромагнитных колебаний, генерируемых РЛС, с земной поверхностью.
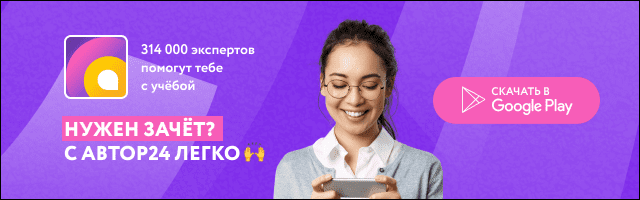
При достижении сигналом земной поверхности происходит отражение и рассеяние волн, а также проникновение вглубь земной поверхности. Интенсивность отраженного сигнала определяется свойствами поверхности (шероховатость, влажность, ориентация в пространстве, крутизна склонов, диэлектрическая проницаемость и др.) и длиной волны излучения. Суть механизма взаимодействия электромагнитных колебаний с подстилающей поверхностью, обуславливающего тон радиолокационного изображения, состоит в следующем:
- радиолокационный сигнал при падении на зеркальную поверхность, например воды, отражается в сторону от радиолокатора и в приемник не попадает. Следовательно, при фиксации его на пленке, почернение определяется только уровнем собственных шумов РЛС, поэтому водные объекты изображаются темным тоном;
- при падении луча на поверхность под углом 90 0 отражение будет происходить в обратном направлении и величина отраженного сигнала будет максимальной, т.е. чем больше крутизна склонов, тем более светлым тоном они изображаются на снимках;
- при взаимодействии сигнала РЛС с шероховатой поверхностью происходит явление диффузного рассеяния электромагнитных колебаний во всех направлениях, и поэтому только часть отраженных волн попадает в приемник РЛС. Интенсивность принятого отраженного сигнала в этом случае имеет очень широкий диапазон.
Исследование влияния физических свойств поверхности на формирование радиолокационного изображения выявили зависимость тона радиолокационного изображения от увлажненности поверхности горных пород, их плотности и других свойств, вызывающих поглощение радиоволн, что приводит к уменьшению интенсивности сигнала, пришедшего в приемник станции.
Благодаря особенностям формирования радиолокационного изображения, на радиолокационных снимках можно получать дополнительную информацию о разрывных тектонических нарушениях, изучении закрытых структур, состоянии сельскохозяйственных культур, увлажненности почвогрунтов и т.д.
Радиолокационная съемка (активная радиолокация) по отношению к фотографической и телевизионной съемке обладает рядом преимуществ, а именно:
- возможностью проведения съемки в любое время суток и при любых погодных условиях (кроме грозовой облачности);
- независимостью разрешающей способности станции от дальности объекта;
- возможностью съемки без непосредственного полета над объектом;
- большой полоса захвата на местности при малой высоте полета;
- возможностью обнаружения объектов по их радиолокационным, а не оптическим контрастам;
- возможностью передачи полученной информации с борта носителя на наземные пункты по радиоканалу на значительные расстояния.
Отличительной особенностью электромагнитных волн радиодиапазона является способность их проникать вглубь объекта, а глубина их проникновения зависит от свойств подстилающей поверхности и длины волны. Чем больше длина волны, тем больше глубина ее проникновения, которая приблизительно равна половине ее длины. В песчаные отложения и пресную воду радиоволны проникают глубже, чем в глинистые породы и соленую воду.
Исходя из особенностей радиолокационной съемки, вытекают возможности практического использования информации в следующих случаях:
- получение изображения поверхности Земли в труднодоступных районах в т.ч. там, где фотосъемка затруднена из-за постоянного облачного покрова.
- оперативное получение в любое время суток и в любых, кроме грозовой облачности, погодных условиях достоверной информации при определении масштабов стихийных бедствий: наводнений, тайфунов, извержения вулканов и др.
- контроль загрязнения морской поверхности при работе бурильных установок (платформ), нефтяных терминалов и других мест возможных выбросов, определение границ загрязнений при авариях танкеров и др.
- оценка состояния ледового покрова и проводка судов в тяжелой ледовой обстановке и др.
Масштабы радиолокационных аэроснимковявляются жесткими значениями и определяются конструкцией радиолокационной станции. РЛСБО "Торос", "Нить" позволяют получать изображение очень трудно добиться постоянства масштаба как по азимуту (по оси х), так и по дальности (по оси у).
Развертка и направление полета (по азимуту) осуществляется за счет движения самолета по маршруту.
Принцип работы РЛСБО "Торос" предполагает получение изображения местности не под самолетом, что присуще плановой аэрофотосъемке, а слева и справа от линии полета, а под носителем образуется так называемая "мертвая зона", т.е. не охватываемая съемкой (рис.18).
Масштаб по азимуту зависит от постоянства отношения скорости развертки по оси х (скорость лентопротяжки перед ЭЛТ) к скорости самолета. При отсутствии автоматического согласования этих элементов возникает искажение масштаба.
Масштаб изображения по дальности также может быть неравномерным и изменяться в зависимости от угла облучения. Это связано с тем, что, например, в системе "Торос" применяется линейная развертка наклонной дальности, т.е. скорость развертки по оси и на экране ЭЛТ постоянна по всей длине строки.
В системах с компьютерным управлением эти недостатки легко устраняются.
Пространственное разрешение изображений, полученных РЛСБО, зависит от размеров импульса, сформированных в направлениях полета и зондирования. Чем меньше эти величины, тем выше разрешающая способность радиолокационной съемки.
Дата добавления: 2016-07-22 ; просмотров: 6331 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
РАДИОЛОКАЦИОННАЯ РАЗВЕДКА ПОГОДЫ
Радиолокационная разведка погоды (РРП) является одним из эффективных средств определения или уточнения метеообстановки по району или маршруту полётов. Она дополняет данные воздушной разведки погоды (ВРП), облегчает задачу уточнения прогноза погоды, предупреждает группу руководства полетами об опасных явлениях погоды. Радиолокационная разведка погоды (РРП) проводится для определения и уточнения зон грозовой деятельности, обложных и ливневых осадков, кучево-дождевых, мощно-кучевых и слоисто-дождевых облаков, высоты их нижней и верхней границ, скорости и направления их движения, а также для 6 обнаружения скопления птиц в воздухе, определения высоты и направления их полета.
Физическая сущность радиолокационного метода обнаружения метеоцелей заключается в том, что под воздействием высокочастотных колебаний, излучаемых передатчиком радиолокатора, в частицах воды и льда, формирующих облако, возникают токи, в результате которых образуется вторичное электромагнитное поле, принимаемое РЛС как отражённая волна.
Радиолокационная предполётная разведка погоды (РРП) проводится независимо от фактического состояния погоды и выполняется не менее двух раз до начала ВРП (за 1 час, 20-25 минут до начала ВРП) и за 30 минут до начала полётов.Периодичность проведения РРП 1 час 20-25 мин ВРП 30 мин ПОЛЁТЫ. Во время полётов при необходимости РРП проводится по указанию руководителя полётов. РРП организует руководитель полётов совместно с дежурным синоптиком. Проводится РРП руководителем дальней зоны (РДЗ), офицером боевого управления (ОБУ), руководителем ближней зоны (РБЗ), руководителем зоны посадки (РЗП) или расчётом МРЛ.
При этом наблюдения по экрану индикатора РЛС ведёт штурман КП, а если индикатор РЛС имеется на КДП, то наблюдения за метеообстановкой по локатору ведут находящиеся там руководитель полётов и дежурный синоптик. При проведении РРП с помощью МРЛ наблюдения ведутся расчетом метеорологического радиолокатора. Полученные резуль таты передаются по телефону дежурному синоптику. Дежурный синоптик, проанализировав данные РРП, докладывает руководителю полётов предложения по обеспечению безопасности полётов. Кроме того, результаты РРП по мере поступления докладываются или передаются открытым текстом или в закодированном виде (код КМИ-85) по проводным (радио) каналам связи и с помощью факсимильных передач - в метеоподраэделение вышестоящего штаба и по запросам в другие метеоподразделения.
Для РРП используются штатные радиолокационные станции (П-35, П-37 и др.) и специальные метеорологические радиолокаторы (МРЛ-2, МРЛ-5). РРП состоит из двух этапов: поиска метеоцелей и наблюдения за ними. Поиск метеоцелей производится при работе РЛС в режиме кругового обзора. Наблюдения за обнаруженными метеоцелями заключаются в *выполнении ряда последовательных операций, заключающихся в определении: * координат метеоцелей (азимут и угол места); * направления и скорости перемещения; * тенденции развития. По форме засветок, полученных на экране индикатора кругового обзора (ИКО), делается заключение, какие обнаружены метеоцели фронтального или внутри массового происхождения. Определение местоположения (координат) метеоцелей осуществляется с помощью азимутальной шкалы и масштабных колец ИКО. В первую очередь, рекомендуется определять характеристики метеоцелей, наиболее интенсивных и близко расположенных к району или маршруту полётов, учитывая при этом пассивные засветки.
Направление и скорость перемещения метеорологической цели (засветок) определяются путём сравнения её координат при двух последовательных замерах, нанесённых на планшет из оргстекла (бланк АВ-9) с временным интервалом 15-30 минут. Соединяя на планшете или карте геометрические центры предыдущего и последующего изображения метеоцелей прямой линией, определяют направление и скорость перемещения этой цели. Угол между направлением на север и прямой, соединяющей два последовательных положения засветки, является направлением (азимутом) движения метеоцели.
Скорость перемещения цели (в км/ч) определяется как частное от деления пройденного пути (в км) на время (в час) между двумя последовательными измерениями. Для прогноза перемещения метеоцелей рекомендуется использовать данные о ветре на соответствующей высоте. Тенденция развития обнао^к^й1шметеоцели определяется сравнением размеров площади и яркости её засветки на И КО, а также путём сравнения величин мощности отражённого сигнала при двух последовательных измерениях.
Очаг развивается, если яркость и мощность отражённого сигнала со временем возрастает при одновременном увеличении площади засветки. Очаг считается ослабевающим (разрушающимся), если наблюдается уменьшение площади и яркости засветки, а также мощности отраженного сигнала. При отсутствии временной изменчивости указанных характеристик и отраженного сигнала считается, что выраженной тенденции к развитию очага нет. Вертикальный разрез метеоцелей производится при помощи наземных радиолокационных высотомеров и МРЛ. Вертикальная мощность облаков определяется по индикатору высоты, как разность между верхней и нижней границами очага.
При этом необходимо учитывать, что в действительности верхняя граница облаков может располагаться выше измерений с помощью РЛС, так как верхняя часть кучево-дождевых облаков состоит из мелких ледяных кристаллов, слабо отражающих и поглощающих радиосигнал. Радиолокационная метеорологическая информация с экрана И КО с помощью планшетов или палетки переносится на бланк формы АВ-7 или АВ-9. Кроме того, данные РРП записываются в журнал разведки погоды формы АВ-17 (Показать плакат 6.3, бланки АВ-7,9,17). При нанесении данных РРП направление движения очагов обозначается стрелкой, указывающей траекторию перемещения. Над стрелкой указывается скорость перемещения в км/ч.
У зоны отражения (овала) проставляются: время наблюдения, тенденция к развитию и высота верхней границы наблюдаемого очага в км (справа от цифры скорости перемещения). Анализ данных РРП даёт возможность более полно и объективно оценить атмосферные процессы, происходящие в интересующем районе, выявить ряд характеристик метеорологических целей, установить структуру облаков вертикального развития и сделать определенные прогностические заключения. Для ведения разведки орнитологической обстановки используются все наземные радиолокационные станции.
Хорошие результаты дают РЛС обнаружения и наведения (П-35, П-37 и др.), которые позволяют проследить за перемещениями птиц на больших высотах в радиусе до 100-150 км от аэродрома. Зона наиболее уверенного обнаружения стай птиц в зависимости от характера отражений от местных предметов располагается на удалении от 30-40 до 60-70 км. Минимальная высота обнаружения птиц составляет 200-300 м.
Диспетчерские радиолокаторы также позволяют обнаруживать птиц, однако их возможности по поиску и опознаванию засветок от птиц несколько хуже, чем радиолокаторов обнаружения и наведения. Наилучшие результаты они дают при работе в масштабе 40 км. При этом прослеживаются стаи, летящие на высоте около 500 м в радиусе 15-40 км. Посадочные радиолокаторы позволяют обнаруживать стаи птиц на удалении от 1 до 15 км при полёте на высотах от 100 до 2000 км.
21. Радиолокационная съемка.
Радиолокационная (РЛ) съемка как один из видов дистанционных методов базируется на использовании радиоволнового участка электромагнитного спектра 0,3-100 см. Особую эффективность такое зондирование приобретает при изучении Земли и геологии других планет Солнечной системы, если их поверхность закрыта для наблюдения (съемки) плотной облачностью, туманом. РЛ-зондирование может проводиться в любое время суток. При РЛ-съемке широко используются радиолокационные станции бокового обзора (РЛС БО).
Материалы РЛ-аэросъемок применяются в региональных геологических исследованиях. Рассмотрим специфику подобного зондирования земной поверхности. Посланный РЛС БО радиосигнал по нормали отражается от встречающихся на его пути объектов и улавливается специальной антенной, затем передается на видикон или фиксируется на фотоэмульсии (фотопленке). Принцип работы основан на фиксировании различного времени прохождения зондирующего импульса до объекта и обратно.
РЛ-снимок формируется бегущим по строке световым пятном. Участок местности, расположенный непосредственно под самолетом, не попадает в область действия радиосигнала и образует «мертвую» зону, величина которой зависит от высоты полета и угла локации. Выраженность РЛ-изображения зависит от степени шероховатости поверхности отражения (земной поверхности), геометрии объекта, угла падения луча, физических свойств поверхности отражения (состав грунтов, влажность и др.).
РЛ-изображения информативны при изучении структурных форм литосферы, если они выражены в рельефе, подчеркнуты сменой литологического состава горных пород или зонами изменения гидрогеологических условий. Разломы и трещины хорошо фиксируются на радарном изображении в виде протяженных линий в том случае, если их простирание совпадает с направлением летательного средства. Низкий угол съемки позволяет использовать теневой эффект для выделения структурных элементов.
Космические РЛ-съемки наиболее информативны при региональном геологическом картографировании, поскольку РЛ-изображения отражают генерализованные структуры, охватывают большие по площади территории.
22. Геологическая информативность аэрокосмических снимков.
Достоверность геологических построений на основе дистанционных методов определяется прежде всего геоинформативностью применяемых материалов аэро- и космических съемок. Последние различаются между собой в зависимости от систем, регистрирующих и передающих на наземные станции информацию о земной поверхности, носителей (космических или воздушных) соответствующей аппаратуры, средств обработки получаемых данных, природных особенностей (сезонных, метеорологических и др.) и целевого назначения съемки.
Применительно к целям геологического дешифрирования под геоинформативностью МДС подразумевается способность аэро- или космического изображения передавать признаки геологических объектов: структурных элементов литосферы, литолого-стратиграфических комплексов, проявлений экзогенных процессов и др. Существенное влияние на геоинформативность МДС оказывает уровень генерализации снимков, их разрешающая способность и спектральные характеристики.
Генерализация изображения земной поверхности на снимке представляет собой естественное изменение пространственных и оптических компонентов ландшафта, в результате чего меняется разрешение деталей местности, формы контуров и оптические градиенты изобразившихся объектов. При этом процессе происходит отфильтровывание небольших природных компонентов, размеры которых меньше разрешающей способности данного фотоизображения.
Геоинформативность МДС тесно связана со спектральным диапазоном дистанционного зондирования, так как ландшафтные индикаторы имеют достаточно четкую спектральную характеристику. Это позволяет распознавать геоиндикаторы с помощью многозональных съемок в видимом и ближнем ИК-диапазонах, а также в дециметровой РЛ-зоне спектра.
В зеленом спектральном диапазоне (0,5-0,6 мкм) значительный объем информации может быть получен о структурных формах и литологическом составе горных пород, дешифрирующихся по геоботаническим признакам
В красной зоне спектра (0,6-0,8 мкм), благодаря надежному отображению рельефа на МДС, появляется возможность дешифрировать структурные особенности литосферы, прослеживаемые в геоморфологических индикаторах.
РЛ-спектральный диапазон фиксирует структурные элементы литосферы в основном по комплексу геоморфологических признаков.
Радиолокационная съемка
Основные преимущества радиолокационной космической съёмки в том, что получать радиолокационные снимки можно вне зависимости от погоды и времени суток: микроволновое излучение свободно проходит сквозь облака и не требует наличия дневного света, как снимки в видимом и ИК-диапазонах.
Задачи радиолокационной съемки
Изначально задачи радиолокационной съёмки ограничивались исследованиями поверхности океана. Сейчас же круг задач радиолокационной съёмки расширился, и радиолокационная съёмка позволяет получать данные о миллиметровых смещениях объектов на земной поверхности, отслеживать нефтяные загрязнения и судовую обстановку в акваториях, а также создавать цифровые модели местности (широко известная ЦММ SRTM создана на основе обработки данных радиолокации).
Обработка РЛС
Стоит отметить, что обработка РЛС достаточно тяжелая задача, потому что радиолокационный снимок имеет непривычное для человеческого глаза изображение в сыром виде. Для обработки РЛС используются специализированные программные продукты, и специалисты должны иметь должный опыт создания вторичных продуктов радиолокационной космической съёмки. Однако, не смотря на это, преимущества РЛС делают использование радиолокационной съёмки очень востребованным.
Можно выделить три степени обработки данных радиолокации:
- Комплексное изображение (SLC) — информация, полученная благодаря фокусировке сигнала передатчика. Радиолокационный снимок на данном уровне обработки РЛС включает в себя два канала: амплитудное ("панхроматическое") изображение в градациях серого цвета и изображение фазы сигнала, которое используется для создания цифровых моделей рельефа и карт смещений земной поверхности
- Геокодированный снимок. Радиолокационный снимок имеет пространственную привязку в определенной системе координат. Радарные снимки на данном уровне обработки РЛС, как правило, поставляются в формате GeoTIFF.
- Ортотрансформированный снимок. Радиолокационный снимок высокого качества, без геометрических искажений от рельефа. Радиолокационная космическая съёмка на данном уровне обработки РЛС применяется для создания картографических материалов и пространственного анализа.
Использование радиолокационной съемки
Задачи радиолокационной съемки расширяются с каждым годом. Инновационная обработка РЛС позволяет открывать все более новые направления использования радиолокационной съемки:
про космос и вселенную и нашу жизнь.
То, что мир бесконечен, — это ничем не доказанный предрассудок.
Опыт использования радиолокационных космических съемок при гидрологических исследованиях

Ю.Б. Баранов, Л.Ю. Кожина, К.Е. Киселевская
В 40 км от побережья Карского моря, в западной части полуострова Ямал расположено наибольшее Бованенковское нефтегазоконденсатное месторождение. В текущем году оно вводится в промышленную эксплуатацию. Для обеспечения промышленной безопасности эксплуатации месторождения, на нем организуется геодинамический полигон, для которого нужен учет гидрогеологических черт территории месторождения.
Не обращая внимания на долгое изучение его территории и начало ввода в эксплуатацию, в гидрологическом отношении площадь самого месторождения и в целом п-ова Ямал изучена слабо. Постоянные гидрологические наблюдения на Ямале ведутся Национальным гидрологическим университетом (ГУ ГГИ) лишь с 2004 г. на р. Сеяхе. Это позвано несколькими обстоятельствами.
Бованенковское месторождение расположено в зоне субарктического пояса, с жёсткой зимний период, длительностью около 9 месяцев и прохладным летом, длительностью около 2 месяцев. Территория очень сильно заболочена и как следствие весьма тяжело проходима.
КЛАССИЧЕСКИЕ ГИДРОЛОГИЧЕСКИЕ Изучения
С 1970 г. различными организациями проводились экспедиционные изучения по гидрографическим обследованиям и гидрологическим наблюдениям, но они не имели системного характера и по большей части были направлены на решение инженерно-геологических задач для целей проектирования разных объектов инфраструктуры. В следствии этих изучений, проводимых среди них и сотрудниками ООО «Газпром ВНИИГАЗ», распознаны особенности гидрологического режима территории месторождения.
Реки, протекающие по территории Бованенковского месторожения, относятся к Западно-Сибирскому типу. Талые воды снабжают 75–80% от общего объема стока, дождевой сток занимает второе место, а грунтовой весьма незначительный, что позвано распространением многолетнемерзлых отложений везде. Водный режим сточных и бессточных озер по большей части определяется притоком талых вод с водозаборов, являющихся склонами озерных котловин.
Исключением являются проточные озера, в каковые талые воды поступают из бассейнов, впадающих в них рек. Распределение стока в течении года очень неравномерное. Максимум – весенне-летнее половодье: июнь – 49,5%, июль — 26,5, август — 10,6.
Темперамент половодья зависит от площади водосборного бассейна, снегозапасов на нем, скорости снеготаяния, наличия дождей во время снеготаяния и другое.
Гидрограф половодья в простые годы одновершинный. Пара пиков наблюдаются при больших колебаниях температур либо при выпадениях дождей. На больших реках половодье начинается в первой половине июня, пик в большинстве случаев 22–24 июня, окончание половодья в последних числах Июля, начале августа. Подъем уровней отмечается в течение 14 дней с интенсивностью 10–50 см/дни.
Ледоход проходит на пике половодья. Спад уровней сперва происходит с большей скоростью, чем подъем, а после этого существенно замедляется.
На малых реках половодье начинается в первых числах Июня. Пик отмечается в середине либо в конце второй декады июня. Заканчивается половодье в последних числах Июня.
Летняя межень продолжается с перерывами с середины июля, начала августа до второй декады октября, в то время, когда появляются первые ледяные образования. Зимняя межень начинается с первых ледяных образований, сток сейчас быстро уменьшается, по окончании промерзания деятельного слоя, в то время, когда исключается подземное питание рек, заканчивается вовсе.
Темперамент гидрологической сети и рельефа местности снабжают колебания уровня воды в реках не только в следствии атмосферных осадков и паводка, но и из-за сгонов и ветровых нагонов. Это явление особенно ярко выражено на некрупных реках имеющих подпор от громадных. Ветровые сгонно-нагонные течения обеспечиваются сильными продолжительными ветрами, дующими над водами Карского моря в широтном направлении.
Высота подъема уровня вод при высоких нагонах может составлять более 1 м, наряду с этим происходит более сильный размыв берегов, чем во время половодья. Не считая ветровых сгонно-нагонных явлений на территории изучения существуют отливы и ежедневные приливы, амплитуда колебаний уровня воды при которых образовывает 10–20 см. Под воздействие приливов попадают и маленькие притоки больших рек.
РАДИОЛОКАЦИОННАЯ КОСМИЧЕСКАЯ ГИДРОЛОГИЯ
Оценить обводненность территории возможно не только по результатам классических (полевых) гидрологических наблюдений, дальнейшего моделирования и измерений, но и дистанционно, в следствии дешифрирования космических изображений. В большинстве случаев для данной цели употребляются эти оптических сенсоров, таких как Landsat, Aster и других. Но их использование в высоких широтах связано со многими трудностями.
Одна из них содержится в том, что в течение весенне-осеннего периода частенько присутствует сильная облачность, которая не разрешает приобретать качественные эти. Не смотря на то, что дешифрирование оптических изображений фактически конкретно разрешает поделить воду от увлажненных либо переувлажненных участков.
Оценка водности и ее временной изменчивости нереально было осуществить на таковой огромной территории, расположенной к тому же в столь непростых климатических условиях ни наземными способами, ни с применением оптических сенсоров. Единственной возможностью совершить такую оценку стало применение радиолокационных спутниковых изображений земной поверхности, для которых облачность не имеет критического значения. Радиолокационные эти складываются из фазового и амплитудного слоев.
Фазовый слой используется для моделей моделей смещений и построения местности земной поверхности. Амплитудный возможно использован для ответа различных задач, а также, и для оценки обводненности территории. Амплитудный слой радиолокационного изображения формируется за счет отражения радиосигнала, чем больше отражение, тем ярче приобретаемое изображение и напротив.
Как мы знаем сила отражения зависит от нескольких факторов, главными из которых являются шероховатость облучаемой поверхности, чем она выше, тем посильнее отражение, и состава поверхности, т.к. различные природные комплексы отличаются разной поглощающей свойство радиоизлучения. Как раз исходя из этого на радиолокационных изображениях обводненные площади характеризуются черным цветом, т. к. как раз вода отлично поглощает электромагнитную энергию радиолокационного сигнала и достаточно довольно часто водное зеркало имеет ровную ровную поверхность, т. е. отличается минимальной шероховатостью.
В случае если на протяжении съемки на водной глади имеется беспокойство, то на радиолокационном изображении вода отображается не черным цветом и довольно часто видны волны. Исходя из физических изюминок радиолокационных данных, при определенной доли приближения, возможно заявить, что чем более чёрное изображение, тем более ровная и мокрая поверхность, а чем более яркое, тем она (поверхность) более изрезанная и сухая.
Рис. 1. Размещение метеорологической станции Марре-Сале.
Оранжевым цветом продемонстрированы месторождения углеводородов
На территорию Бованенковского месторождения у авторов имелся последовательность радиолокационных изображений со спутника TerraSAR-X за 2008 г., с периодичностью съемки около 2-х недель. Была отобрана серия летних снимков, наряду с этим начальный и конечный снимок выбирались с учетом фактической погоды на дату съемки. Употреблялась информация по погоде на станции Марре-Сале, ближайшей к месторождению (рис.
1). Метеорологическая информация была взята с сайта http://rp5.ru/, куда информацию о фактической погоде поступают с наземных метеорологических станций через совокупность свободного интернационального обмена метеоданными.
По космическим радиолокационным данным была проанализирована информация о наличии снежного покрова (для более корректного ответа задачи нужно отсутствие снега на поверхности почвы). Первым из серии забран радиолокационный снимок на дату в то время, когда снег всецело сошел (табл. 1). Конечное изображение серии выбиралось кроме этого с учетом снежного покрова. 29.09.2008 г. в первый раз выпал снег, образовав сухой снежный покров 1 см толщины.
Исходя из погодных условий, были отобраны радиолокационные изображения (рис. 2), даты съемки которых следующие: 30.06.2008; 11.07.2008; 22.07.2008; 02.08.2008; 13.08.2008; 24.08.2008; 04.09.2008; 15.09.2008; 26.09.2008.
Таблица 1
Метеорологическая информация по станции Марре-Сале
| Местное время в Марре-Сале | Температура окружающей среды (2 м над почвой), °C | Количество выпавших осадков, мм | Время за которое выпали осадки, час | Состояние поверхности земли со снегом | Высота снежного покрова, см |
| 11.06.2008 9:00 | -1,3 | –– | –– | Слежавшийся либо мокрый снег (со льдом либо без него), покрывающий менее половины поверхности земли. | 15 |
| 28.06.2008 9:00 | 6,5 | –– | –– | Слежавшийся либо мокрый снег (со льдом либо без него), покрывающий менее половины поверхности земли. | 0 |
| 29.06.2008 9:00 | 11,7 | –– | –– | –– | –– |
| 30.06.2008 9:00 | 13,1 | –– | –– | –– | –– |
| 26.09.2008 9:00 | 0,4 | –– | –– | –– | –– |
| 27.09.2008 9:00 | 2 | –– | –– | –– | –– |
| 28.09.2008 9:00 | -2,3 | –– | –– | –– | –– |
| 29.09.2008 9:00 | -0,9 | –– | –– | Ровный слой сухого рассыпчатого снега покрывает поверхность земли всецело. | 1 |
Рис. 2. Космические изображения TerraSAR-X, отобранные для определения водности территории
Исходя из обрисованных выше закономерностей формирования радиолокационного изображения, было предположено, что самые тёмные участки соответствуют открытой воде, а самые светлые сухой поверхности. Космические изображения были классифицированы, результаты классификации приведены на рисунке 3. Анализ взятых результатов говорит о том, что большая водность территории приходится на конец июня, после этого отмечается спад и достаточно равномерная обводненность.
Сравнение результатов классификации по радиолокационным данным с картой глубин затопления Бованенковского НГКМ, вычисленным ГУ ГГИ, показывает их высокую сходимость. Карта глубин затопления показывает площади и глубины затопления территории при больших уровнях воды различной возможности превышения, смоделированные в условиях принятой гидрологической модели. Но модель никак не отображает степень влажности поверхности и очень во многом зависит от модели местности, применяемой при расчете.
Рис. 3. Динамика обводненности территории Бованенковского месторождения по итогам классификации амплитудного слоя радиолокационных снимков TerraSAR-X
Итог классификации радиолокационных данных показывает степень увлажненности поверхности в момент съемки. Максимумы соответствуют открытой водной поверхности, а высокие значения — переувлажненным и мокрым грунтам. направляться подчернуть, что водонасыщенность грунта оказывает значительное влияние на скорости протекания страшных геокриогенных процессов и проходимость территории.
Совмещение данных по увлажненности поверхности, основанных на итогах классификации радиолокационных изображений с высокодетальными моделями рельефа разрешает оценить глубины затопления, а помимо этого повышает прогнозирования и качество интерпретации, основанное на актуальных площадных фактических данных, что имеет особенно громадное значение при работах на труднодоступных территориях со непростыми климатическими условиями.
Выполненная работа разрешила на фактическом материале оценить изменчивость увлажненности поверхности, проследить ее динамику в летний период. Сопоставление взятых результатов с картами инфраструктуры позволяет для разрушения опасности и анализа подтопления паводковыми водами существующих и проектируемых объектов инфраструктуры промысла, и для оценки эффективности:
- существующих водопропусков;
- всплытия трубопроводов и ликвидаций подтопления;
- проводимых противопаводковых мероприятий и другое.
Раздельно направляться отметить тот факт, что подобный анализ радиолокационных космических разрешённых позволяет подобрать снимки, пригодные для предстоящей интерферометрической обработки, в целях построения цифровых моделей.
Бэкстейдж со съемок фильма о радиофизике Александре Минце
Подобранные по важим запросам, статьи по теме:
В. В. Асмус, В. А. Кровотынцев, А. М. Алферов, Н. П. Иванова Введение. Фрагмент снимка, взятого с космического аппарата (КА) RapidEye 21 августа 2009 г.,…
С.А. Антонов (Ставропольский НИИСХ) Окончил Ставропольский национальный университет, по профессии «информатик-географ». На данный момент — зав….
В.А. Генин (БГУ, Республика Беларусь) В 2010 г. окончил Белорусский национальный университет по профессии «география». На данный момент — учитель кафедры…
А. В. Гормаш, И. В. Оньков, В. А. Чернопазов, М. А. Кривенко Действенное управление развитием муниципального хозяйства, качественное ответ задач…
Махер Кури Детальная информация, приобретаемая компанией DigitalGlobe благодаря проведению мультиспектральной 8-канальной космической съемки большого…
К. Дуглас (Kim Douglass), М. Хейнен (Markus Heynen) RapidEye: первое знакомство Быть может, RapidEye — не первое наименование, которое приходит вам в…
Влияние метеорологических условий на радиолокационное наблюдение. Помехи
Атмосферные влияния, увеличивающие дальность обнаружения. Значительное искривление луча радиоволн (суперрефракция) наблюдается тогда, когда скорость снижения температуры с высотой меньше, чем при стандартных условиях, или когда скорость уменьшения содержания водяных паров в атмосфере с высотой больше стандартной. Оба эти условия увеличивают дальность действия РЛС, причем при их совместном проявлении радиолокационный луч может оказаться в приземном слое, называемом атмосферным волноводом.
Атмосферные явления, уменьшающие дальность обнаружения. Дальность радиолокационного наблюдения может быть снижена при появлении пониженной рефракции (субрефракции) при наличии осадков, тумана и песчаных бурь).
Субрефракция создается при быстром падении температуры с увеличением высоты, особенно ночью, или при условии, когда температура теплого прилегающего слоя воздуха охлаждается холодным морем почти до точки росы. В первом случае имеет место хорошая видимость, во втором случае появляется туман. Явление субрефракции часто встречается в арктических районах, однако резкого снижения дальности при этом не наблюдается.
Наиболее существенное снижение дальности обнаружения вызывается плотным туманом или дождем. Град влияет так же, как дождь соответствующей интенсивности, влияние снега сказывается меньше.
Помехи от волнения. Они имеют характерный вид. Радиус засветки зависит от состояния мири и может достигать 6- 7 миль
Засветка от морских волн опасна тем, что на ее фоне могут быть замаскированы даже сильные сигналы от объектов (суда, буи и т. п.). В этих случаях для уменьшения интенсивности засветки применяется временная автоматическая регулировка усиления (ВАРУ).
При наличии засветки от морских волн, делающей возможным в ближней зоне, ручку «ВАРУ» («Помехи от моря») следует устанавливать в такое положение, при котором область сплошной засветки превратится в отдельные флуктуирующие точки, на фоне которых можно выделить эхо-сигналы от объектов. необходимо помнить, что чрезмерное уменьшение усиления в ближней зоне может привести к потере эхо-сигналов от малых судов и других надводных объектов. Поэтому надо следить, чтобы всегда наблюдались отдельные выбросы помех от моря.
Интенсивность помех от морского волнения тем меньше, чем короче длительность излучаемых импульсов. Во всех судовых РЛС на крупномасштабных шкалах .0,5- -4 мили) применяются короткие импульсы 0,07 0,1 мкс. на других шкалах—длинные. Поэтому, если, например, ведется наблюдение на шкале 8 миль РЛС «Океан», то в случае большого волнения целесообразно включить шкалу 4 мили, сместив начало развертки на край экрана и сторону. противоположную курсу судна.
В РЛС «Океан» и «Енисей-Р» для более эффективной борьбы с помехами от морских волн целесообразно использовать десятисантиметровый диапазон, так как интенсивность помех в этом диапазоне значительно меньше, чем в трехсантиметровом. Кроме того, в РЛС «Енисей-Р» предусмотрен режим совместной обработки сигналов разных диапазонов волн, когда работают оба передатчика, а сигналы с выходов обоих приемников после совместной обработки поступают на один индикатор. Это позволяет получить существенное снижение уровня помех от волнения при сохранении высокой разрешающей способности по углу, присущей трехсантиметровому диапазону.
Помехи от осадков и низкой облачности.Ширина диаграммы направленности антенны в вертикальной плоскости составляет 15-20° Поэтому выпадающие осадки (сильный дождь, град, снегопад), а также низкие насыщенные влагой облака будут обнаруживаться так же. как и обычные объекты, и воспроизводиться на экране в виде засвеченных областей, маскирующих эхо-сигналы от судов.
При наличии помех от осадков рекомендуется включать дифференциатор (тумблер «МПВ» или «Дождь»), одновременно увеличивая усиление. При этом становится возможным выделить сильные эхо-сигналы от объектов на фоне засветки от выпадающих осадков, а также получить более детализированное изображение при проходе узкостей и при наличии сплошной яркой засветки берегов. В двухдиапазонных станциях весьма эффективной мерой подавления помех от осадков является переход на длину волны 10 см или работа в двух диапазонах одновременно с совместной обработкой сигналов.
Интенсивность помех от осадков существенно снижается при работе короткими излучаемыми импульсами Поэтому при необходимости наблюдения за обстановкой впереди по курсу в пределах 5 миль целесообразно эпизодически на короткое время включать крупномасштабную шкалу дальности.
Помехи, вызванные боковыми лепестками диаграммы направленности антенны. Некоторая часть энергии излучается антенной в виде боковых лепестков диаграммы направленности, расположенных по обе стороны от главного луча на различных углах. В результате близко расположенные сильно отражающие объекты начинают обнаруживаться, кроме главного лепестка, ещё и боковыми лепестками, что приводит к появлению на экране серии ложных отметок, сильно растянутых по углу и расположенных симметрично относительно истинной отметки.
Обычно ложные сигналы такого рода наблюдаются на дальностях не более 3—4 миль и могут быть ослаблены с помощью ВАРУ. Однако при регулировке ВАРУ следует помнить, что одновременно ослабляются и полезные сигналы, особенно сигналы малых судов и плавучих навигационных знаков.
Ложные и многократные отражения. Сигналы от близко расположенного объекта могут быть получены двумя путями: путем прямого облучения и путем облучения за счет отражения от судовых надстроек (мачты, трубы и т. п.). Это обстоятельство приводит к появлению на экране двух сигналов - одного на истинном направлении и правильном расстоянии и ложного на таком же расстоянии, но в теневой зоне. Если теневые зоны известны, то не составляет труда отличить действительные сигналы от ложных.
При наблюдении объектов на небольших расстояниях возможно также появление ложных сигналов за счет многократного отражения (например, если вблизи проходит крупное судно, то излученные импульсы могут многократно отражаться от обоих судов), располагающихся в виде серии отметок на равных интервалах по одному направлению. В этом случае действительным является только первый сигнал, все остальные обычно скоро исчезают при увеличении дистанции или изменении взаимного ракурса судов.
Помехи от работающих РЛС. Они имеют место тогда, когда поблизости находятся другие суда с работающими радиолокаторами того же частотного диапазона, что и радиолокатор судна-наблюдателя. Помехи этого рода могут также наблюдаться от береговых РЛС и от своих вторых РЛС. По внешнему виду они представляют собой серии точек или линии, располагающиеся радиально по всему экрану либо в виде спирали.
Они легко отличаются от других эхо-сигналов по внешнему виду. При каждом обороте антенны они меняют свое положение.
Теневые зоны. Теневыми зонами наз.ся секторы обзора РЛС, в которых вследствие влияния судовых препятствий (мачт, труб и др.) дальность действия станции уменьшается либо объект совершенно не обнаруживается. Величина теневой зоны зависит от ширины препятствия и его расстояния до антенны РЛС,
При эксплуатации РЛС теневые зоны можно наблюдать на экране в виде темных секторов на фоне помех от морского волнения. Таким путем можно наиболее просто определить их и учитывать при использовании РЛС.
Следует иметь в виду, что в зонах обзора, находящихся на границе теневых секторов, диаграмма направленности антенны искажается, боковые лепестки усиливаются, что вызывает ухудшение разрешающей способности РЛС и точности измерений углов.